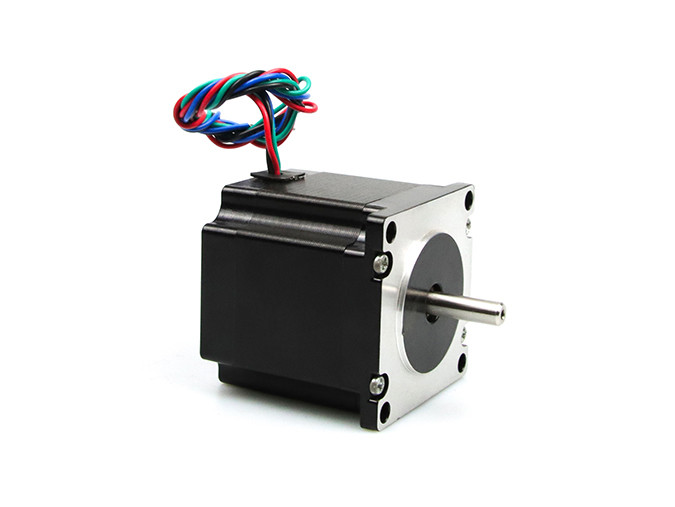
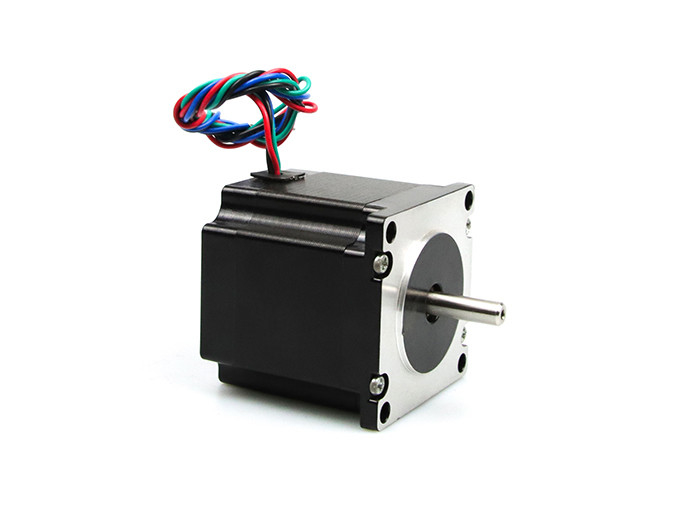
57BYG 57mm Nema 23 स्टेपर मोटर ड्राइवर के साथ 12v 24v 36v 2.8A 1.26N.M 2N.M 3N.M सीएनसी फ्रिलिंग मशीन के लिए इस्तेमाल किया
NEMA 23 एक स्टेपर मोटर है जिसमें 2.3×2.3 इंच (58.4×58.5 मिमी) का फेसप्लेट और 1.8° का स्टेप एंगल (200 कदम/चक्र) है। प्रत्येक चरण 3.2 V पर 2.8 A खींचता है, जिससे 19 kg-cm का होल्डिंग टॉर्क संभव होता है।NEMA 23 स्टेपर मोटर का प्रयोग आमतौर पर प्रिंटर में किया जाता है, सीएनसी मशीन, रैखिक एक्ट्यूएटर और हार्ड ड्राइव।
यह नेमा 23 स्टेपर मोटर के लिए सबसे मजबूत मॉडल है, यह 1.8 डिग्री के कदम कोण (200 कदम / क्रांति) के साथ है। प्रत्येक चरण 4.2A खींचता है, जो 3.0Nm ((425oz.in का एक धारक टोक़ की अनुमति देता है।
एक बड़ा स्टेपर मोटर, यह NEMA 23 बहुत बदलाव से गुजरने वाले बड़े भारों को स्थानांतरित करने के लिए पर्याप्त मजबूत है। यह स्टेपर सभी स्लश इंजन मॉडल के साथ इस्तेमाल किया जा सकता है। यह 1.3 एन प्रदान करता है।m टॉर्क और यात्रा कर सकते हैं400 आरपीएम तकस्टेपर प्रति कदम 1.8 डिग्री की यात्रा करता है।
NEMA 23 3 Nm टोक़-गति के साथ आता है, लेकिन यह विभिन्न ऑपरेटिंग गति लागू करके परिवर्तनशील है. वास्तव में टोक़ कई कारकों पर निर्भर करता है, जो लागू कर रहे हैं वर्तमान,वोल्टेज और तीसरे कारक मोटर के भीतर कॉइल के प्रेरण है.
1. 57 मिमी हाइब्रिड स्टेपर मोटर का सामान्य विनिर्देश:
| नाम |
स्टेपर मोटर नेमा 23 |
| मॉडल |
JK57HS56-2804 |
| मोटर प्रकार |
2 चरण चरण मोटर |
| नामित वोल्टेज |
2.52V |
| रखरखाव टोक़ |
1.26 एन.एम. |
| कदम कोण |
1.8 डिग्री या 1.9 डिग्री या 1.2 डिग्री |
| वर्तमान |
2.8A |
| शाफ्ट |
6.35 मिमी या 8 मिमी डी-कट शाफ्ट |
| प्रयोग |
JKONGMOTOR स्टेपिंग मोटर एक मोटर है जो विद्युत धड़कन संकेतों को संबंधित कोणीय विस्थापन या रैखिक विस्थापन में परिवर्तित करता है।इस छोटे स्टेपर मोटर व्यापक रूप से विभिन्न क्षेत्रों में इस्तेमाल किया जा सकता है, जैसे 3 डी प्रिंटर, मंच प्रकाश व्यवस्था, लेजर उत्कीर्णन, कपड़ा मशीनरी, चिकित्सा उपकरण, स्वचालन उपकरण आदि।
|
2. नेमा 23 स्टेपर मोटर्स (1.8 डिग्री) के विद्युत विनिर्देशः
| मॉडल नं. |
कदम कोण |
मोटर लंबाई |
वर्तमान
चरण
|
प्रतिरोध
चरण
|
प्रेरण
चरण
|
रखरखाव टोक़ |
# लीड्स के |
थ्रस्ट टॉर्क |
रोटर इनेर्शिया |
मास |
| (°) |
(L) mm |
ए |
ओ |
एमएच |
एन.एम. |
नहीं. |
जी.सी.एम. |
जी.सी.एम.2 |
किलो |
| JK57HS41-1006 |
1.8 |
41 |
1 |
7.1 |
8 |
0.48 |
6 |
250 |
150 |
0.47 |
| JK57HS41-2008 |
1.8 |
41 |
2 |
1.4 |
1.4 |
0.39 |
8 |
250 |
150 |
0.47 |
| JK57HS41-2804 |
1.8 |
41 |
2.8 |
0.7 |
1.4 |
0.55 |
4 |
250 |
150 |
0.47 |
| JK57HS51-1006 |
1.8 |
51 |
1 |
6.6 |
8.2 |
0.72 |
6 |
300 |
230 |
0.59 |
| JK57HS51-2008 |
1.8 |
51 |
2 |
1.8 |
2.7 |
0.9 |
8 |
300 |
230 |
0.59 |
| JK57HS51-2804 |
1.8 |
51 |
2.8 |
0.83 |
2.2 |
1.01 |
4 |
300 |
230 |
0.59 |
| JK57HS56-2006 |
1.8 |
56 |
2 |
1.8 |
2.5 |
0.9 |
6 |
350 |
280 |
0.68 |
| JK57HS56-2108 |
1.8 |
56 |
2.1 |
1.8 |
2.5 |
1 |
8 |
350 |
280 |
0.68 |
| JK57HS56-2804 |
1.8 |
56 |
2.8 |
0.9 |
2.5 |
1.2 |
4 |
350 |
280 |
0.68 |
| JK57HS64-2804 |
1.8 |
64 |
2.8 |
0.8 |
2.3 |
1 |
4 |
400 |
300 |
0.75 |
| JK57HS76-2804 |
1.8 |
76 |
2.8 |
1.1 |
3.6 |
1.89 |
4 |
600 |
440 |
1.1 |
| JK57HS76-3006 |
1.8 |
76 |
3 |
1 |
1.6 |
1.35 |
6 |
600 |
440 |
1.1 |
| JK57HS76-3008 |
1.8 |
76 |
3 |
1 |
1.8 |
1.5 |
8 |
600 |
440 |
1.1 |
| JK57HS82-3004 |
1.8 |
82 |
3 |
1.2 |
4 |
2.1 |
4 |
1000 |
600 |
1.2 |
| JK57HS82-4008 |
1.8 |
82 |
4 |
0.8 |
1.8 |
2 |
8 |
1000 |
600 |
1.2 |
| JK57HS82-4204 |
1.8 |
82 |
4.2 |
0.7 |
2.5 |
2.2 |
4 |
1000 |
600 |
1.2 |
| JK57HS100-4204 |
1.8 |
100 |
4.2 |
0.75 |
3 |
3 |
4 |
1100 |
700 |
1.3 |
| JK57HS112-3004 |
1.8 |
112 |
3 |
1.6 |
7.5 |
3 |
4 |
1200 |
800 |
1.4 |
| JK57HS112-4204 |
1.8 |
112 |
4.2 |
0.9 |
3.8 |
3.1 |
4 |
1200 |
800 |
1.4 |
357 मिमी स्टेपिंग मोटर (0.9 डिग्री) का विद्युत विनिर्देशः
| मॉडल नं. |
कदम कोण |
मोटर लंबाई |
वर्तमान
चरण
|
प्रतिरोध
चरण
|
प्रेरण
चरण
|
रखरखाव टोक़ |
# लीड्स के |
थ्रस्ट टॉर्क |
रोटर इनेर्शिया |
मास |
| (°) |
(L) mm |
ए |
ओ |
एमएच |
किलोग्राम |
नहीं. |
जी.सी.एम. |
जी.सी.एम.2 |
किलो |
| JK57HM41-1006 |
0.9 |
41 |
1 |
5.7 |
8 |
3.9 |
6 |
210 |
120 |
0.45 |
| JK57HM41-2804 |
0.9 |
41 |
2.8 |
0.7 |
2.2 |
5 |
4 |
210 |
120 |
0.45 |
| JK57HM51-2006 |
0.9 |
51 |
2 |
1.6 |
2.2 |
7.2 |
6 |
380 |
280 |
0.68 |
| JK57HM56-1006 |
0.9 |
56 |
1 |
7.4 |
17.5 |
9 |
6 |
400 |
300 |
0.7 |
| JK57HM56-2006 |
0.9 |
56 |
2 |
1.8 |
4.5 |
9 |
6 |
400 |
300 |
0.7 |
| JK57HM56-2804 |
0.9 |
56 |
2.8 |
0.9 |
3.3 |
12 |
4 |
400 |
300 |
0.7 |
| JK57HM76-1006 |
0.9 |
76 |
1 |
8.6 |
23 |
13.5 |
6 |
680 |
480 |
1 |
| JK57HM76-2006 |
0.9 |
76 |
2 |
3 |
7 |
13.5 |
6 |
680 |
480 |
1 |
| JK57HM76-2804 |
0.9 |
76 |
2.8 |
1.15 |
5.6 |
18 |
4 |
680 |
480 |
1 |
4तीन चरण चरण मोटर (1.2 डिग्री) की विद्युत विनिर्देशः
| मॉडल नं. |
कदम कोण |
मोटर लंबाई |
वर्तमान
चरण
|
प्रतिरोध
चरण
|
प्रेरण
चरण
|
रखरखाव टोक़ |
थ्रस्ट टॉर्क |
रोटर इनेर्शिया |
मास |
| (°) |
(L) mm |
ए |
ओ |
एमएच |
किलोग्राम |
जी.सी.एम. |
जी.सी.एम.2 |
किलो |
| JK57H3P42-5206 |
1.2 |
42 |
5.2 |
1.3 |
1.4 |
4.5 |
210 |
110 |
0.45 |
| JK57H3P56-5606 |
1.2 |
56 |
5.6 |
0.7 |
0.7 |
9 |
400 |
300 |
0.75 |
| JK57H3P79-5206 |
1.2 |
79 |
5.2 |
0.9 |
1.5 |
15 |
680 |
480 |
1.1 |
5बंद लूप स्टेपर मोटर का विद्युत विनिर्देश:
| मॉडल नं. |
कदम कोण |
मोटर लंबाई |
वर्तमान
चरण
|
प्रतिरोध
चरण
|
प्रेरण
चरण
|
रखरखाव टोक़ |
# लीड्स के |
थ्रस्ट टॉर्क |
रोटर इनेर्शिया |
मास |
| (°) |
(L) mm |
ए |
ओ |
एमएच |
एन.एम. |
नहीं. |
जी.सी.एम. |
जी.सी.एम.2 |
किलो |
| JK57HSN12 |
1.8 |
56 |
4.2 |
0.4 |
1.5 |
1.2 |
4 |
350 |
280 |
0.98 |
| JK57HSN21 |
1.8 |
76 |
4.2 |
0.6 |
2 |
2.1 |
4 |
600 |
440 |
1.1 |
| JK57HSN30 |
1.8 |
112 |
4.2 |
0.9 |
4 |
3.0 |
4 |
1200 |
800 |
1.4 |
6.नमा 23 ब्रेक का विद्युत विनिर्देश:
| ब्रेक मॉडल |
BK2 |
| रखरखाव टॉर्क ((एन-एम) |
2 |
| वोल्टेज ((V) |
24V |
| L2 लंबाई ((मिमी) |
32 |
7. नेमा 23 रैखिक पेंच का विद्युत विनिर्देश:
| पेंच व्यास |
स्क्रू लीड |
स्क्रू पिच |
कदम के अनुसार यात्रा |
पेंच व्यास |
स्क्रू लीड |
स्क्रू पिच |
कदम के अनुसार यात्रा |
| मिमी |
मिमी |
मिमी |
मिमी |
मिमी |
मिमी |
मिमी |
मिमी |
|
Tr8
|
1 |
1 |
0.005 |
Tr8
|
10 |
2 |
0.05 |
| 2 |
2 |
0.01 |
12 |
2 |
0.06 |
| 3 |
1.5 |
0.015 |
14 |
2 |
0.07 |
| 4 |
2 |
0.02 |
/ |
/ |
/ |
| 8 |
2 |
0.04 |
/ |
/ |
/ |
| पेंच व्यास |
स्क्रू लीड |
स्क्रू पिच |
कदम के अनुसार यात्रा |
पेंच व्यास |
स्क्रू लीड |
स्क्रू पिच |
कदम के अनुसार यात्रा |
| मिमी |
मिमी |
मिमी |
मिमी |
मिमी |
मिमी |
मिमी |
मिमी |
|
Tr10
|
2 |
2 |
0.01 |
Tr12
|
2 |
2 |
0.01 |
| 3 |
1.5 |
0.015 |
3 |
3 |
0.015 |
| 4 |
2 |
0.02 |
8 |
2 |
0.04 |
| 8 |
2 |
0.04 |
10 |
2 |
0.05 |
| 10 |
2 |
0.05 |
/ |
/ |
/ |
| 12 |
2 |
0.06 |
/ |
/ |
/ |
8नेमा 23 चरण मोटर का चित्रण:

9. 57 मिमी नेमा 23 स्टेप मोटर के सीसा तार:
10सीएनसी स्टेपर मोटर का अनुकूलित डिजाइन:
11.विभिन्न शाफ्ट प्रकार:
12बायोप्लर स्टेप मोटर के फायदे
- नियंत्रण के लिए कम लागत प्राप्त
- स्टार्टअप और कम गति पर उच्च टोक़
- कठोरता
- निर्माण की सरलता
- एक खुले पाश नियंत्रण प्रणाली में काम कर सकते हैं
- कम रखरखाव
- रुकने या फिसलने की संभावना कम
- किसी भी वातावरण में काम करेगा
- इसका प्रयोग रोबोटिक्स में व्यापक स्तर पर किया जा सकता है।
- उच्च विश्वसनीयता
- मोटर का घूर्णन कोण इनपुट पल्स के आनुपातिक होता है।
- मोटर में पूर्ण टोक़ है (यदि घुमावों को ऊर्जा दी जाती है)
- सटीक स्थिति और आंदोलन की दोहरावशीलता क्योंकि अच्छे स्टेपर मोटर्स में एक चरण की सटीकता 3 से 5% होती है और यह त्रुटि एक चरण से दूसरे चरण तक संचयी नहीं होती है।
- स्टार्ट/स्टॉप/रिवर्स करने पर उत्कृष्ट प्रतिक्रिया।
- बहुत विश्वसनीय क्योंकि मोटर में कोई संपर्क ब्रश नहीं है। इसलिए, मोटर का जीवन बस असर के जीवन पर निर्भर करता है।
- डिजिटल इनपुट पल्स पर मोटर्स की प्रतिक्रिया ओपन-लूप नियंत्रण प्रदान करती है, जिससे मोटर को नियंत्रित करना सरल और कम महंगा हो जाता है।
- बहुत कम गति वाले सिंक्रोनस रोटेशन को उस भार के साथ प्राप्त करना संभव है जो सीधे शाफ्ट से जुड़ा हुआ है।
- घूर्णन गति की एक विस्तृत श्रृंखला का एहसास किया जा सकता है क्योंकि गति इनपुट पल्स की आवृत्ति के आनुपातिक है।
13चरण मोटर्स के अनुप्रयोग:
चूंकि स्टेपर मोटर को इनपुट पल्स का उपयोग करके डिजिटल रूप से नियंत्रित किया जाता है, इसलिए वे कंप्यूटर नियंत्रित प्रणालियों के साथ उपयोग के लिए उपयुक्त हैं।
इनका प्रयोग मशीन टूल्स के संख्यात्मक नियंत्रण में किया जाता है।
टेप ड्राइव, फ्लॉपी डिस्क ड्राइव, प्रिंटर और इलेक्ट्रिक घड़ियों में प्रयोग किया जाता है।
स्टेपर मोटर का प्रयोग एक्स-वाई प्लॉटर और रोबोटिक्स में भी किया जाता है।
इसका कपड़ा उद्योगों और एकीकृत सर्किट निर्माण में व्यापक अनुप्रयोग है।
स्टेपर मोटर के अन्य अनुप्रयोगों में ग्रहों की वैज्ञानिक खोज आदि के लिए प्रक्षेपित अंतरिक्ष यान शामिल हैं।
इन मोटर्स को विभिन्न प्रकार के वाणिज्यिक, चिकित्सा और सैन्य अनुप्रयोगों में भी पाया जाता है और विज्ञान कथा फिल्मों के उत्पादन में भी उपयोग किया जाता है।

 आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!
आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!